








公司动态
现代自动驾驶汽车体验:没有瑕疵 转弯正确 永不超速
导语:许多企业都在测试无人驾驶汽车,现代也是其中一份子。最近,Extremetech记者Bill Howard 坐上了现代Ioniq自动驾驶汽车,汽车晚上行驶时表现与白天一样好。未来,现代的目标是降低成本,尤其是激光雷达组件的成本,预计到了2020或者2021年,现代自动驾驶汽车就会走向市场。
全文如下:
上周,我们驾驶现代Ioniq无人驾驶概念车在拉斯维加斯跑了几圈。汽车在拉斯维加斯会议中心周围的公路上跑了3英里,完全自动驾驶,晚上,汽车又跑了一趟,借此证明传感器和4个前置摄像头运行良好。
一路上没有出现什么紧张事件,测试司机也没有干预行驶。和其它测试版无人驾驶汽车一样,Ioniq穿过拉斯维加斯大道时没有超速,车流并不密集,其它汽车开得更快。
Ioniq没有闯红灯,不久前,Uber在旧金山测试无人驾驶汽车时闯了红灯。从整体上看,Ioniq仍然处在开发阶段,现代能够在2020-2021年推出自动驾驶汽车,时间与其它汽车制造商差不多。

车顶没有设备
许多自动驾驶汽车会在车顶或者侧边安装设备,告诉别人它是一款在在开发的无人驾驶汽车,现代Ioniq测试汽车没有安装这样的设备。汽车前面挂了一块特殊车牌,前缀是AU,代表无人驾驶汽车。传感器装在车身内部,加起来共有十几个传感器,挡风玻璃上方有4个摄像头。要追踪目标,用光学元件最便宜,Ioniq安装了光学元件,还配备了雷达和激光雷达传感器,它们可以搭配使用。
在挡风玻璃顶部安装了摄像头阵列,那里有两个立体摄像头,它们可以监控车身两侧的交通状况,还有一个摄像头扫描交通灯,瞄准的位置略微朝上,交通灯摄像头位于两个立体摄像头中央。简单来讲:交通灯摄像头会盯住交通灯,知道它是绿的、黄的还是红的。在摄像头右侧是反射镜固定架,没有安装摄像头,右侧稍远的地方是Mobileye/TRW行人检测、车道分离警报摄像头。

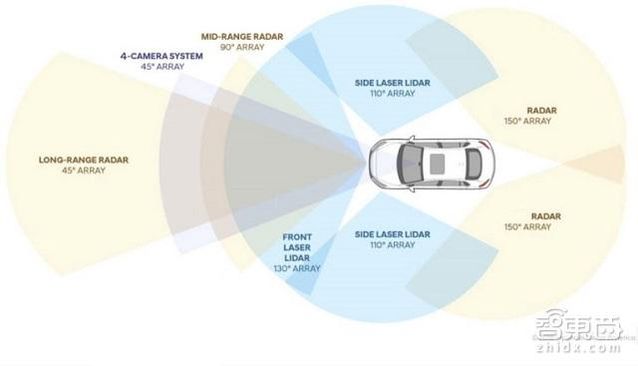
在格栅和保险杠后面有3个IBEO激光雷达单元和雷达,包括45度长程雷达阵列和90度中程雷达。前侧方激光雷达覆盖110度角,后侧方雷达覆盖150度角,各有一对。汽车的视野可以覆盖360度范围。
整个汽车只有一个传感器盲点:靠近车门的狭小空间。不过如果这个地方有东西,会提前被前侧方激光雷达、后侧方雷达捕捉到,信息会传送给邻近的传感器。现代说,汽车的地图是公司自己开发的。
现代研发团队说,在未来约5年时间内,公司会让自动驾驶元件变得更便宜。例如,让激光雷达传感器覆盖130度角,而不是360度,这样可以降低成本。激光雷达扫描设备的成本一度高达7万美元,最近降到了8000美元,仍然很贵,Osram正在开发二极管激光雷达,没有活动组件,芯片组量产成本不到50美元。
平稳行驶 不需要司机干预
在体验时,行程大约3英里,起点是“西部之门酒店(Westgate Hotel)”,终点是拉斯维加斯会展中心。现代测试司机先驾驶汽车开了大约100码远,让汽车驶出停车场,然后启动自动驾驶模式。
路线是这样的:汽车向北开进Paradise Road,右转,进入Sahara Road,右转,进入Joe W. Brown公路;Joe W. Brown是一条弯曲的公路,位于西部之门酒店与拉斯维加斯会展中心后方;汽车再右转,进入Desert Inn Road公路,右转回到Paradise Road公路,穿过拉斯维加斯会展中心,驶入西部之门停车场。在进入停车场时没有使用自动驾驶模式。
前面的乘客舱和生产版汽车差不多一样,只是在中控台安装了黄色和红色紧急停车按钮。后面有两块LCD屏幕,连接在座位靠背上。左边的显示屏用视频显示交通灯摄像头侦测的图像,如果发现交通灯,就会用框框显示。右边显示屏显示传感器看到的路面视野,我们可以看到前方路况有哪些限制,预测路线是怎样的。
如果乘客第一次乘坐,会发现汽车行驶时很平静:加速、刹车很平稳,转弯流畅,不会超过限制速度。试车时离圣诞大约还有一周半时间,拉斯维加斯上午10点的交通并不繁忙,如果行人在附近行走,或者靠近人行横道,汽车就会减速,判断行人是否会穿过人行横道。
一辆停止的汽车阻挡了车道,传感器发现了,Iqniq打开左转向灯,找到一个口子向左转,穿过停止的汽车,然后回到右车道。
整个行驶过程平静无奇,和我们驾驶过的自动驾驶汽车差不多。我们在密歇根Dearborn的福特总部体验过Fusion无人驾驶汽车,还在匹兹堡体验过Delphi / Mobileye用奥迪Q5研发的无人驾驶汽车。所有自动驾驶汽车都不会超出限制速度。

在黑暗中行驶
傍晚,我们又驾驶汽车开了一圈,体验和白天差不多。传感器(包括4个摄像头)可以从街灯、其它汽车、头灯吸收足够的光线,成功绘制区域图像和障碍物图像。
好几次汽车遇到红灯右转。其它测试过的自动驾驶汽车遇到红灯不会右转,不知道是故意这样编程的,还是条件不适合。现代解释说,如果车流从右向左穿过,出现左转箭头,汽车向左转,此时Ioniq可以红灯右转。
在行驶时还出现一个小插曲。当我们的汽车在右车道行驶时,左车道的汽车停止行驶,车开始堆积;一辆皮卡的前端稍微压到了车道线,看起来似乎应该停车。我们的汽车放慢速度,停止,然后等情况清楚之后再次前进。不需要司机干预。
今年冬天, 2017款现代Ioniq就会上市销售,共有三个版本,一款是电动版,续航里程124英里;一款是混合动力版本;还有一款是插电式混合动力版本,用电池可以续航27英里,2017年夏天推出。
当汽车出货时,Ioniq Blue混合动力汽车的EPA评级最高,综合油耗58 mpg(城市57mpg,高速公路29mpg),比丰田普锐斯Eco还要好一些,虽然它的综合油耗也是58 mpg。两款汽车都安装了低滚动助力轮毂和轮胎,油耗比主流混合动力汽车高1-2 mpg。Ioniq Blue的重量不到3000磅,而普锐斯Eco约为3033磅。
Ioniq的后部空间有点紧,因为它的尺寸没有索纳塔大,只有176英寸,比伊兰特还要短4英寸。
现代工程师表示,Ioniq有三个版本,采用不同的传动系统,现代希望Ioniq和自动驾驶系统看起来尽可能像普通汽车,同时还要将价格控制在合理水平。正因如此,现代对光学传感器很有兴趣,在激光雷达、雷达、光学传感器中,光学传感器的成本最低。移动激光雷达成本高昂,它可能会被便宜的固态激光雷达替代。激光雷达制造商Osram表示,固态激光雷达模块量产成本不到50美元,相当于移动激光雷达成本的一百分之一。


